Neuro-symbolic AI for reliable human-swarm collaboration in complex environments
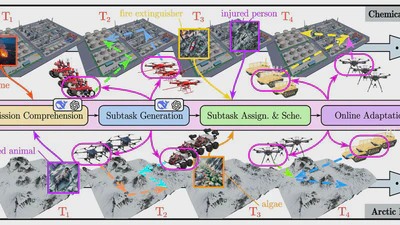
We propose a formal method and LLM framework for coordinating large fleets of heterogeneous robots in open and dynamic environments. Our approach integrates model-checking-based …
Junfeng Chen