LLMs Meet Formal Methods for Robot Swarms: Reliable, Explainable and Efficient Human-in-the-loop Planning in Unknown Environments
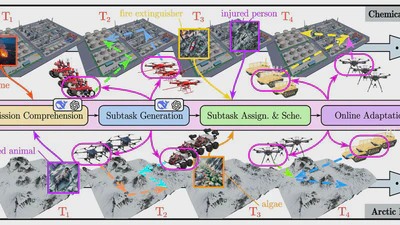
We propose a formal method and LLM framework for coordinating large fleets of heterogeneous robots in open and dynamic environments. Our approach integrates model-checking-based …