DEXTER-LLM: Dynamic and Explainable Coordination of Multi-Robot Systems in Unknown Environments via Large Language Models
Oct 22, 2025·


 ,·
0 min read
,·
0 min read
Yuxiao Zhu
Equal contribution
Junfeng Chen
Equal contribution
Xintong Zhang
Meng Guo
Corresponding author
,Zhongkui Li
Abstract
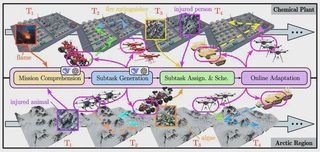
We propose DEXTER-LLM, a novel framework for dynamic task planning in unknown environments. Our approach integrates LLM-based multi-stage reasoning, optimization-based task assignment, and adaptive human-in-the-loop verification to tackle the challenges of online adaptability and explainability.
Type
Publication
In IROS 2025