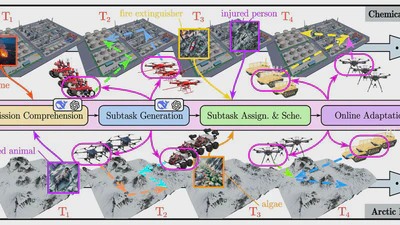
DEXTER-LLM: Dynamic and Explainable Coordination of Multi-Robot Systems in Unknown Environments via Large Language Models
We propose DEXTER-LLM, a novel framework for dynamic task planning in unknown environments. Our approach integrates LLM-based multi-stage reasoning, optimization-based task …