New RSS workshop abstract on belief-guided contact exploration for low-cost robot arms.
Computer Science undergraduate
Yuxiao Zhu 朱煜肖
I study robot decision-making under uncertainty, from LLM-based task allocation and explainable coordination in heterogeneous teams to belief-guided contact exploration for low-cost robot arms.
LLM Task Reasoning
Multi-Robot Coordination
Contact-Rich Manipulation
Proprioceptive Sensing
Melding LLM and temporal logic is on arXiv and under review at npj Robotics.
Presenting DEXTER-LLM at IROS 2025 in Hangzhou.
Research
Planning, coordination, and contact-rich exploration for robots under uncertainty.
I am interested in how robots can make useful decisions when sensing, communication, and environment models are incomplete. My work connects language-model reasoning for robot teams with belief-guided manipulation that treats contact as information rather than only as failure.
Language-Guided Team Coordination
How can language models translate high-level mission intent into actionable, explainable robot-team decisions?
Adaptive and Communication-Aware Planning
How should symbolic reasoning, optimization, and search interact when the environment changes online or communication is limited?
Proprioceptive Contact Exploration
How can low-cost robot arms convert weak contact cues into actionable beliefs for probing, reaching, retreating, and gentle pushing?
My broader interests include large model task reasoning, agentic task planning, multi-agent collaboration, heterogeneous multi-robot coordination, communication-aware planning, contact-rich manipulation, actionable belief modeling, and proprioceptive sensing for low-cost arms.
Publications
Selected papers
5 selected works
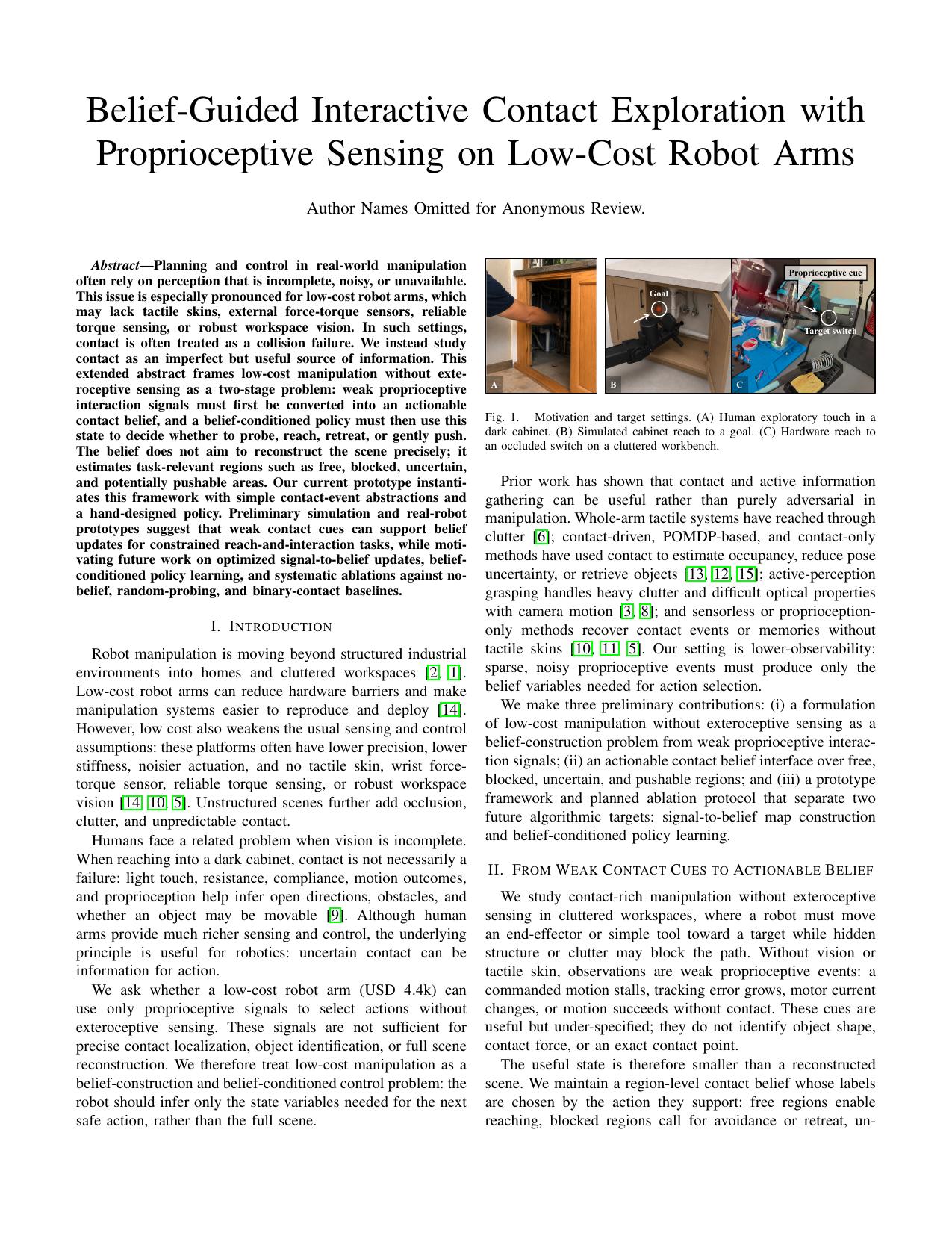
RSS Workshop Extended Abstract
Belief-Guided Interactive Perception for Manipulation in Clutter under Noisy Proprioception
Frames low-cost manipulation without exteroceptive sensing as a belief-construction and belief-conditioned control problem, turning weak proprioceptive contact cues into actionable free, blocked, uncertain, and pushable regions.

Nature Partner Journals Robotics (under review)
Melding LLM and temporal logic for reliable human-swarm collaboration in complex scenarios
A neuro-symbolic framework that melds verifiable temporal-logic task planning with context-grounded LLM reasoning for reliable, low-overhead human-swarm collaboration in dynamic scenarios.
IROS 2025
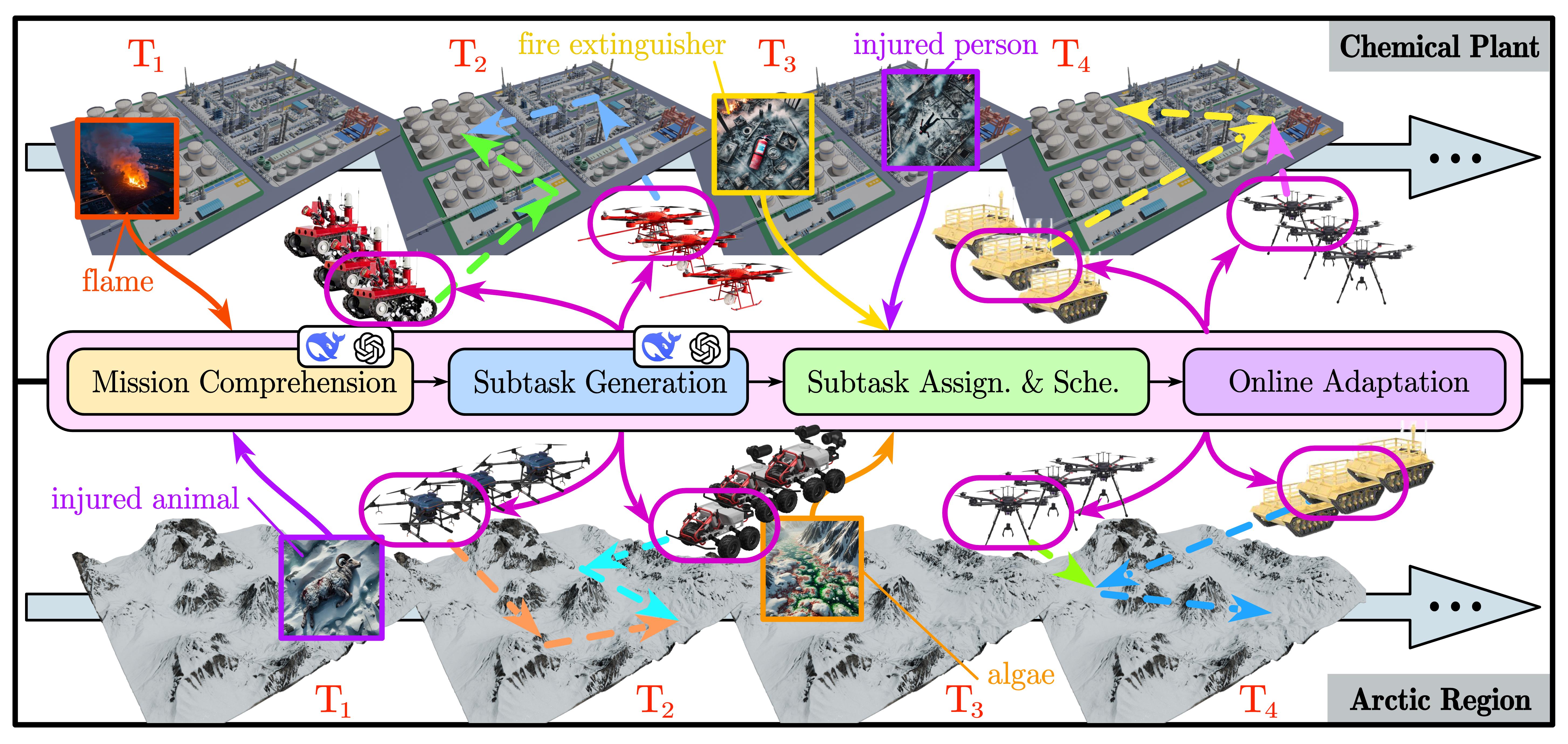
DEXTER-LLM: Dynamic and Explainable Coordination of Multi-Robot Systems in Unknown Environments via Large Language Models
DEXTER-LLM integrates LLM-based multi-stage reasoning, optimization-based task assignment, and adaptive human-in-the-loop verification for dynamic task planning in unknown environments.
BibTeX
@INPROCEEDINGS{11247301,
author={Zhu, Yuxiao and Chen, Junfeng and Zhang, Xintong and Guo, Meng and Li, Zhongkui},
booktitle={2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title={DEXTER-LLM: Dynamic and Explainable Coordination of Multi-Robot Systems in Unknown Environments via Large Language Models},
year={2025},
pages={10182-10189},
doi={10.1109/IROS60139.2025.11247301}
}
IEEE Robotics and Automation Letters (RA-L)
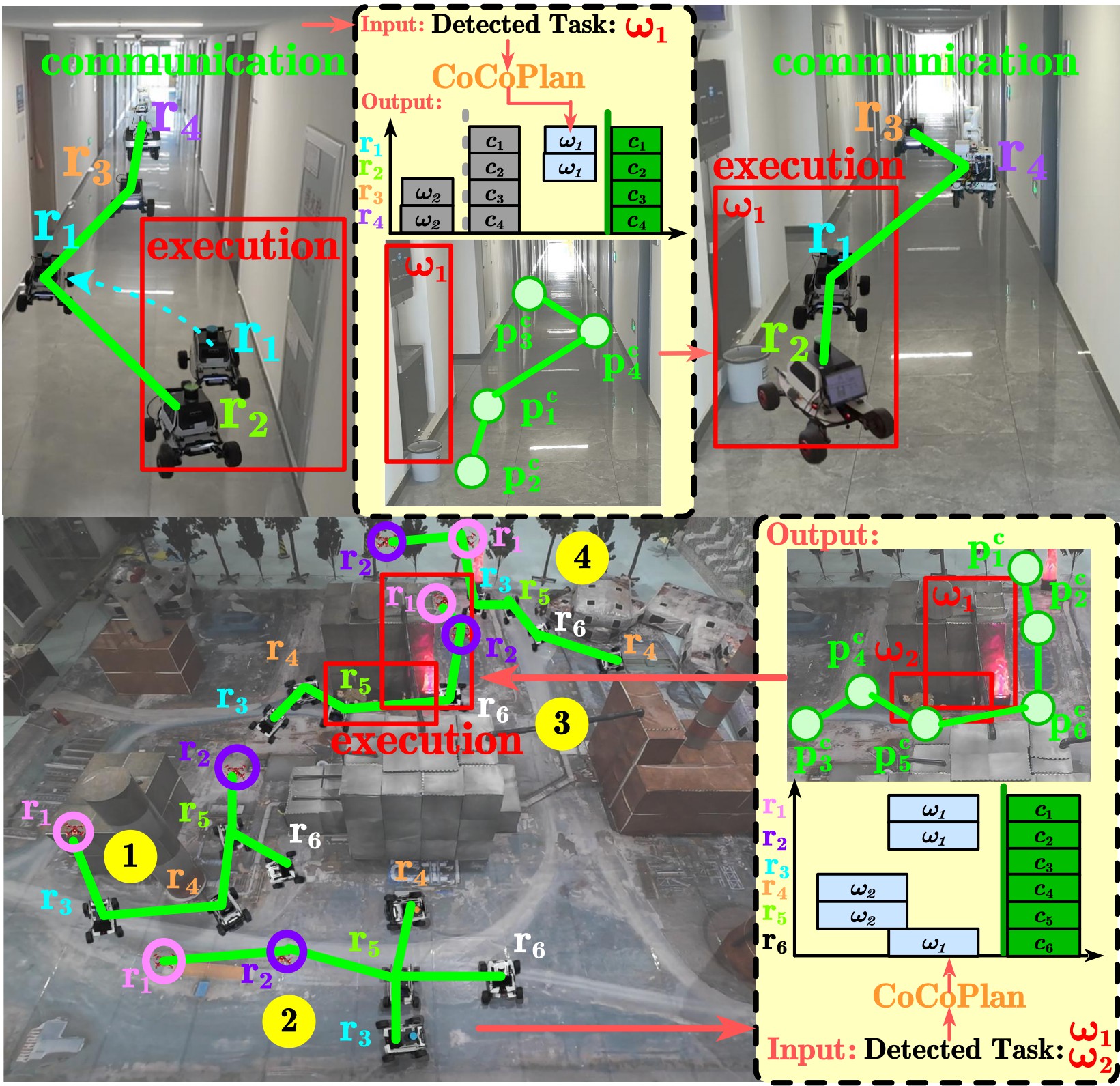
CoCoPlan: Adaptive Coordination and Communication for Multi-robot Systems in Dynamic and Unknown Environments
CoCoPlan co-optimizes collaborative task planning and intermittent communication for multi-robot systems in dynamic environments under limited connectivity.
BibTeX
@ARTICLE{11361077,
author={Zhang, Xintong and Chen, Junfeng and Zhu, Yuxiao and Luo, Bing and Guo, Meng},
journal={IEEE Robotics and Automation Letters},
title={CoCoPlan: Adaptive Coordination and Communication for Multi-Robot Systems in Dynamic and Unknown Environments},
year={2026},
volume={11},
number={3},
pages={3270-3277},
doi={10.1109/LRA.2026.3656769}
}
IEEE Transactions on Automation Science and Engineering (T-ASE)
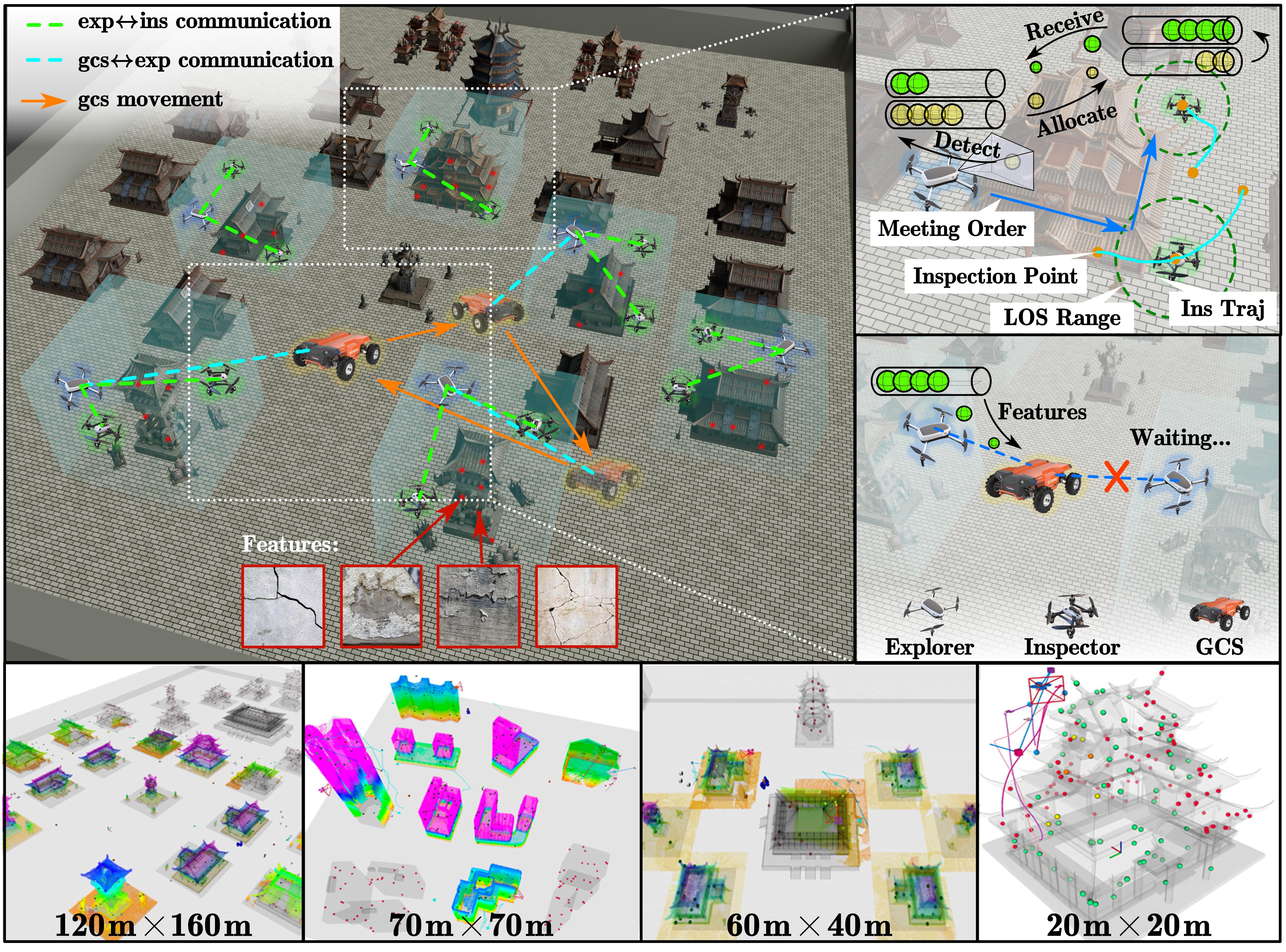
SLEI3D: Simultaneous Exploration and Inspection via Heterogeneous Fleets under Limited Communication
SLEI3D is a planning and coordination framework for heterogeneous multi-robot systems performing simultaneous 3D exploration, inspection, and real-time reporting.
BibTeX
@ARTICLE{11298198,
author={Chen, Junfeng and Zhu, Yuxiao and Zhang, Xintong and Luo, Bing and Guo, Meng},
journal={IEEE Transactions on Automation Science and Engineering},
title={SLEI3D: Simultaneous Exploration and Inspection via Heterogeneous Fleets under Limited Communication},
year={2025},
pages={1-1},
doi={10.1109/TASE.2025.3643166}
}Experience
Research training

Visiting Researcher
Visiting research with Prof. Xianyi Cheng on belief-guided contact exploration and robot manipulation with proprioceptive sensing.

Research Assistant (Hybrid)
Conducted continuous hybrid online and in-person research with Prof. Meng Guo on multi-agent collaboration, LLM-based robot coordination, and heterogeneous multi-robot planning.
Education
Academic background
Spring Exchange Semester

B.S. in Computer Science
Talks
Recent and upcoming presentations
DEXTER-LLM: Dynamic and Explainable Coordination of Multi-Robot Systems in Unknown Environments via Large Language Models
IROS 2025 Conference, Hangzhou International Expo Center, Hangzhou, China.
Presentation on dynamic task planning in unknown environments via LLM-based reasoning, optimization-based task assignment, and adaptive human-in-the-loop verification.
