I’m an undergraduate student majoring computer science at Duke Kunshan University. I am recently collaborating with Prof. Meng Guo (国萌) and his team, especially Dr. Junfeng Chen (陈俊锋) from Peking University. I am a member of Edge Intelligence Lab supervised by Prof. Bing Luo (罗冰).
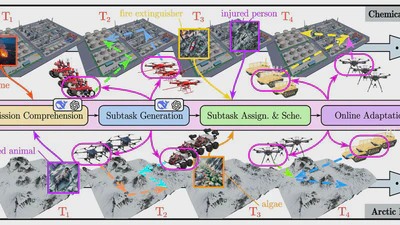
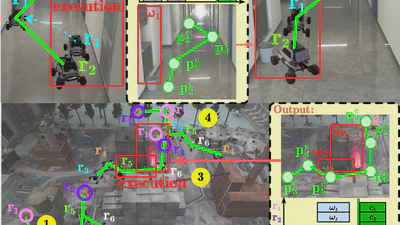
My research focuses on leveraging large language models (LLMs) to enhance task allocation and online adaptation in heterogeneous multi-robot fleets (e.g., UAVs/UGVs). My work also integrates optimization and search algorithms to improve coordination and communication strategies, especially under intermittent connectivity, limited communication, and unknown environments.